

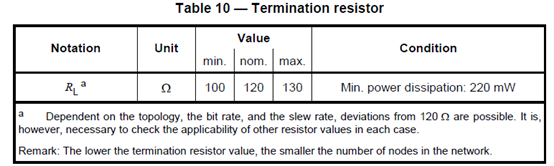
CAN 버스 종단 저항은 일반적으로 120Ω입니다. 실제로 설계 시 60Ω 저항 스트링 두 개가 사용되며, 버스에는 일반적으로 120Ω 노드 두 개가 있습니다. CAN 버스에 대해 조금이라도 아는 사람들은 거의 다 안다고 할 수 있습니다. 누구나 다 아는 사실이죠.
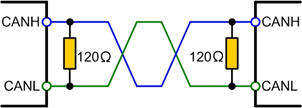
CAN 버스 단말 저항에는 세 가지 효과가 있습니다.
1. 간섭 방지 능력을 향상시켜 고주파, 저에너지 신호를 빠르게 전달합니다.
2. 버스가 신속하게 숨겨진 상태로 진입하도록 하여 기생 커패시터의 에너지가 더 빨리 소모되도록 합니다.
3. 신호 품질을 개선하고 버스의 양쪽 끝에 배치하여 반사 에너지를 줄입니다.
1. 간섭방지 능력 향상
CAN 버스는 "명시적"과 "숨김"의 두 가지 상태를 갖습니다. "표현적"은 "0"을, "숨김"은 "1"을 나타내며 CAN 트랜시버에 의해 결정됩니다. 아래 그림은 CAN 트랜시버와 CANh 및 CANl 연결 버스의 일반적인 내부 구조도입니다.
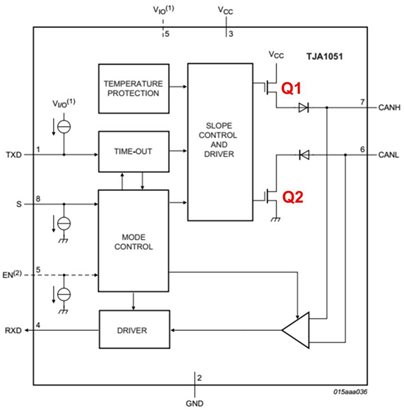
버스가 명시적일 때, 내부의 Q1과 Q2가 켜지고, 캔과 캔 사이의 압력 차이가 발생합니다. Q1과 Q2가 차단되면 Canh와 Canl은 압력 차이가 0인 수동 상태가 됩니다.
버스에 부하가 없으면 은닉 시간 차이의 저항값이 매우 큽니다. 내부 MOS 튜브는 고저항 상태입니다. 외부 간섭은 버스가 명시적(송수신기 일반 섹션의 최소 전압인 500mV)에 진입하는 데 매우 작은 에너지만 필요합니다. 이때 차동 모델 간섭이 발생하면 버스에 명백한 변동이 발생하고, 이러한 변동이 흡수될 공간이 없어 버스에 명시적 위치가 생성됩니다.
따라서 은닉 버스의 간섭 방지 성능을 향상시키기 위해 차동 부하 저항을 증가시킬 수 있으며, 저항값은 대부분의 노이즈 에너지의 영향을 방지하기 위해 가능한 한 작게 설정해야 합니다. 그러나 과도한 전류가 은닉 버스로 유입되는 것을 방지하기 위해 저항값은 너무 작아서는 안 됩니다.
2. 숨겨진 상태로 빠르게 진입할 수 있도록 합니다.
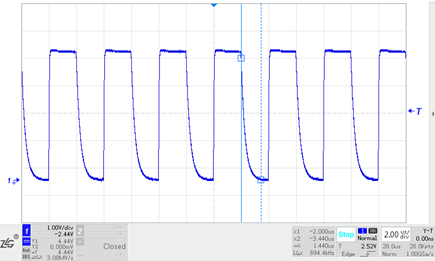
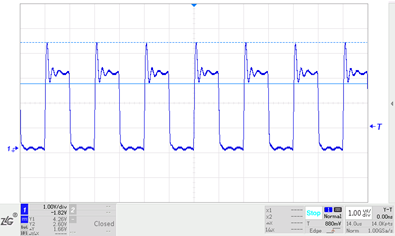
명시적 상태에서는 버스의 기생 커패시터가 충전되며, 이 커패시터는 은닉 상태로 돌아갈 때 방전되어야 합니다. CANH와 CANl 사이에 저항 부하가 없으면, 커패시턴스는 트랜시버 내부의 차동 저항에 의해서만 충전될 수 있습니다. 이 임피던스는 비교적 큽니다. RC 필터 회로의 특성에 따라 방전 시간이 상당히 길어질 수 있습니다. 아날로그 테스트를 위해 트랜시버의 CANh와 CANl 사이에 220pF 커패시터를 추가했습니다. 위치 속도는 500kbit/s입니다. 파형은 그림에 나와 있습니다. 이 파형의 감소는 비교적 긴 상태입니다.
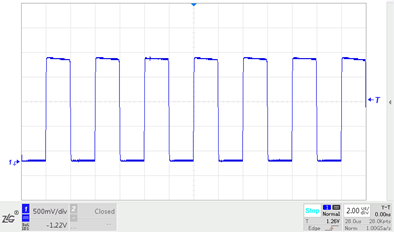
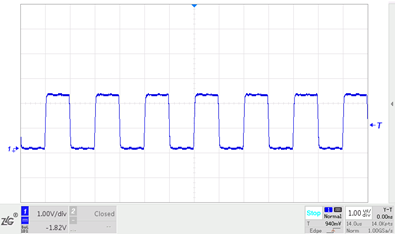
버스 기생 커패시터를 빠르게 방전하고 버스가 히든 상태로 빠르게 진입하도록 하려면 CANH와 CANl 사이에 부하 저항을 배치해야 합니다. 60Ω을 추가한 후Ω 저항의 파형은 그림에 나와 있습니다. 그림에서 명시적 저항이 후퇴 상태로 복귀하는 시간은 128ns로 단축되었으며, 이는 명시적 저항의 확립 시간과 동일합니다.
3. 신호 품질 개선
신호가 높은 변환율로 높을 때, 임피던스가 일치하지 않으면 신호 에지 에너지가 신호 반사를 발생시킵니다. 전송 케이블 단면의 기하학적 구조가 변하고, 그에 따라 케이블의 특성이 변하며, 반사 또한 반사를 유발합니다. 에센스
에너지가 반사될 때, 반사를 일으키는 파형이 원래 파형에 중첩되어 종소리가 생성됩니다.
버스 케이블 끝단에서 임피던스의 급격한 변화는 신호 에지 에너지 반사를 유발하고, 버스 신호에 벨(bell) 현상이 발생합니다. 벨이 너무 크면 통신 품질에 영향을 미칩니다. 케이블 특성과 동일한 임피던스를 갖는 종단 저항을 케이블 끝에 추가하면 이 에너지 부분을 흡수하여 벨 발생을 방지할 수 있습니다.
다른 사람들이 아날로그 테스트를 수행했습니다(사진은 제가 복사했습니다). 위치 속도는 1MBIT/s였고, 송수신기 Canh와 Canl은 약 10m 꼬인 선을 연결했고 트랜지스터는 120에 연결되었습니다.Ω 숨겨진 변환 시간을 보장하기 위한 저항. 종료 시 무부하. 종료 신호 파형이 그림에 나와 있으며, 신호 상승 에지는 종 모양으로 나타납니다.
120이면Ω 꼬인 선의 끝에 저항을 추가하면 종단 신호 파형이 현저히 개선되고 벨 소리가 사라집니다.
일반적으로 직선 토폴로지에서는 케이블의 양단이 송신단과 수신단이 됩니다. 따라서 케이블 양단에 종단 저항을 하나씩 추가해야 합니다.
실제 적용 과정에서 CAN 버스는 일반적으로 완벽한 버스형 설계가 아닙니다. 많은 경우 버스형과 스타형이 혼합된 구조입니다. 아날로그 CAN 버스의 표준 구조는 다음과 같습니다.
왜 120을 선택해야 하나요?Ω?
임피던스란 무엇일까요? 전기 과학에서 회로 전류의 장애물을 임피던스라고 합니다. 임피던스 단위는 옴(Ohm)이며, Z(복수형 z = r+i)로 자주 사용됩니다.ωl –1/(ωc)). 구체적으로 임피던스는 저항(실제 부분)과 전기 저항(가상 부분)의 두 부분으로 나눌 수 있습니다. 전기 저항에는 정전용량과 감각 저항도 포함됩니다. 커패시터에 의해 발생하는 전류를 정전용량이라고 하고, 인덕턴스에 의해 발생하는 전류를 감각 저항이라고 합니다. 여기서 임피던스는 Z의 몰드를 의미합니다.
모든 케이블의 특성 임피던스는 실험을 통해 얻을 수 있습니다. 케이블 한쪽 끝에는 구형파 발생기를, 다른 쪽 끝에는 가변 저항기를 연결하여 오실로스코프를 통해 저항의 파형을 관찰합니다. 저항의 신호가 벨 없는 양호한 구형파가 될 때까지 저항 값을 조정합니다. 이는 임피던스 정합 및 신호 무결성을 의미합니다. 이 때 저항 값은 케이블의 특성과 일치하는 것으로 간주할 수 있습니다.
두 대의 자동차가 사용하는 일반적인 케이블 두 개를 사용하여 꼬인 선으로 변형시키면 위의 방법으로 약 120Ω의 특징 임피던스를 얻을 수 있습니다.Ω. 이는 CAN 표준에서 권장하는 종단 저항입니다. 따라서 실제 라인 빔 특성을 기반으로 계산된 것이 아닙니다. 물론 ISO 11898-2 표준에도 정의가 있습니다.
왜 0.25W를 선택해야 하나요?
이는 몇 가지 오류 상태와 함께 계산해야 합니다. 차량 ECU의 모든 인터페이스는 전원 단락과 접지 단락을 고려해야 하므로 CAN 버스 전원 공급 장치의 단락도 고려해야 합니다. 표준에 따르면 18V 단락도 고려해야 합니다. CANH가 18V 단락되었다고 가정하면 전류는 단자 저항을 통해 CANl로 흐르고, 120V의 전력으로 인해Ω 저항은 50mA*50mA*120입니다Ω = 0.3W. 고온에서 양이 감소하는 것을 고려하면 종단 저항의 전력은 0.5W입니다.
게시 시간: 2023년 7월 5일





